ALLEX: A Humanoid Robot Designed for Human Connection
- Niwwrd
- Sep 15, 2025
- 3 min read

Humanoid robots are no longer limited to mechanical functions. They are gradually becoming companions capable of staying close to people in everyday life. The ALLEX design project explores how humanoid robots, whether evolving in ways similar to humans or through unique developments of their own, can exist naturally alongside us.
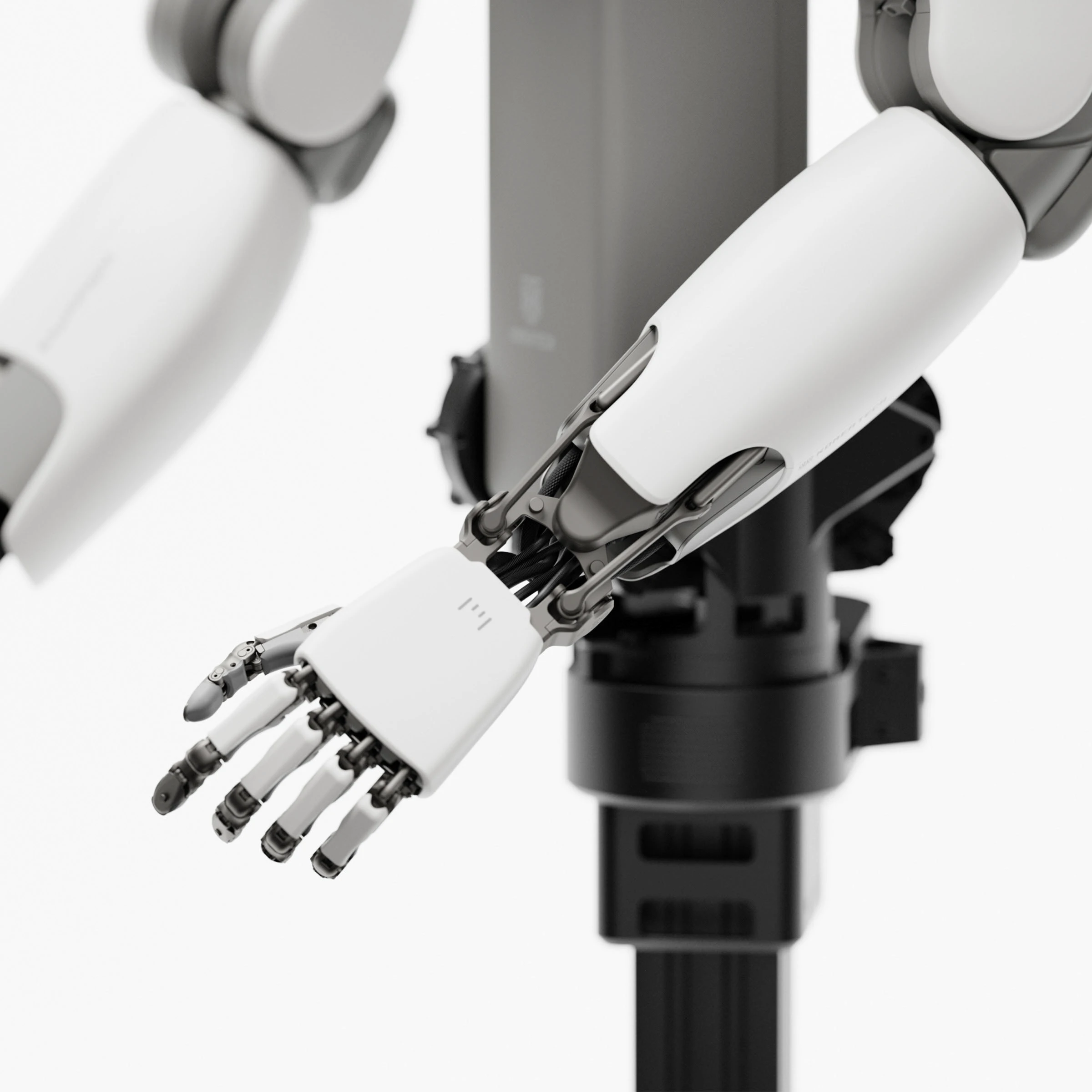
Developed by WIRobotics in collaboration with KOREATECH, ALLEX is a universal humanoid robot designed for delicate, human-like interaction. Its body uses back drivability technology that allows it to yield to external forces, absorb impacts, and move smoothly. The arms are built with low friction and rotational inertia, which makes them stop safely even when interrupted mid-motion. The hands rely on a purely mechanical structure to sense and adjust to external forces, without requiring tactile sensors. With 15 degrees of freedom and proportions similar to a human hand, they combine refined dexterity with powerful strength.


Design Approach
ALLEX was created with safe and friendly human–robot interaction at its core. Its form is simple yet aesthetically refined, ensuring movements are clear and easy to understand during interaction. The overall proportions of the robot take cues from the human body, allowing it to blend naturally into spaces without creating discomfort. This thoughtful balance reduces psychological distance and establishes a sense of comfort.





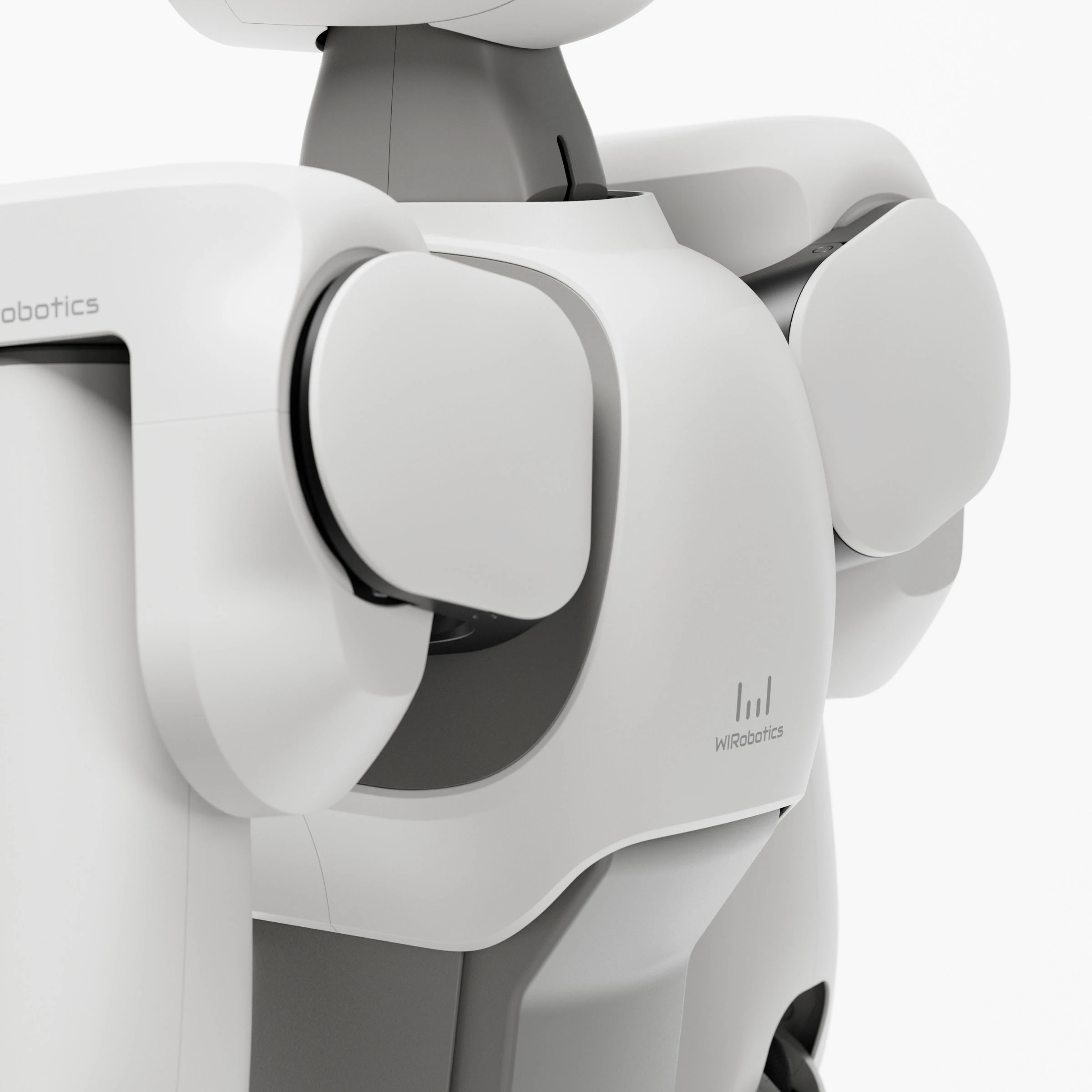
Head and Body Design
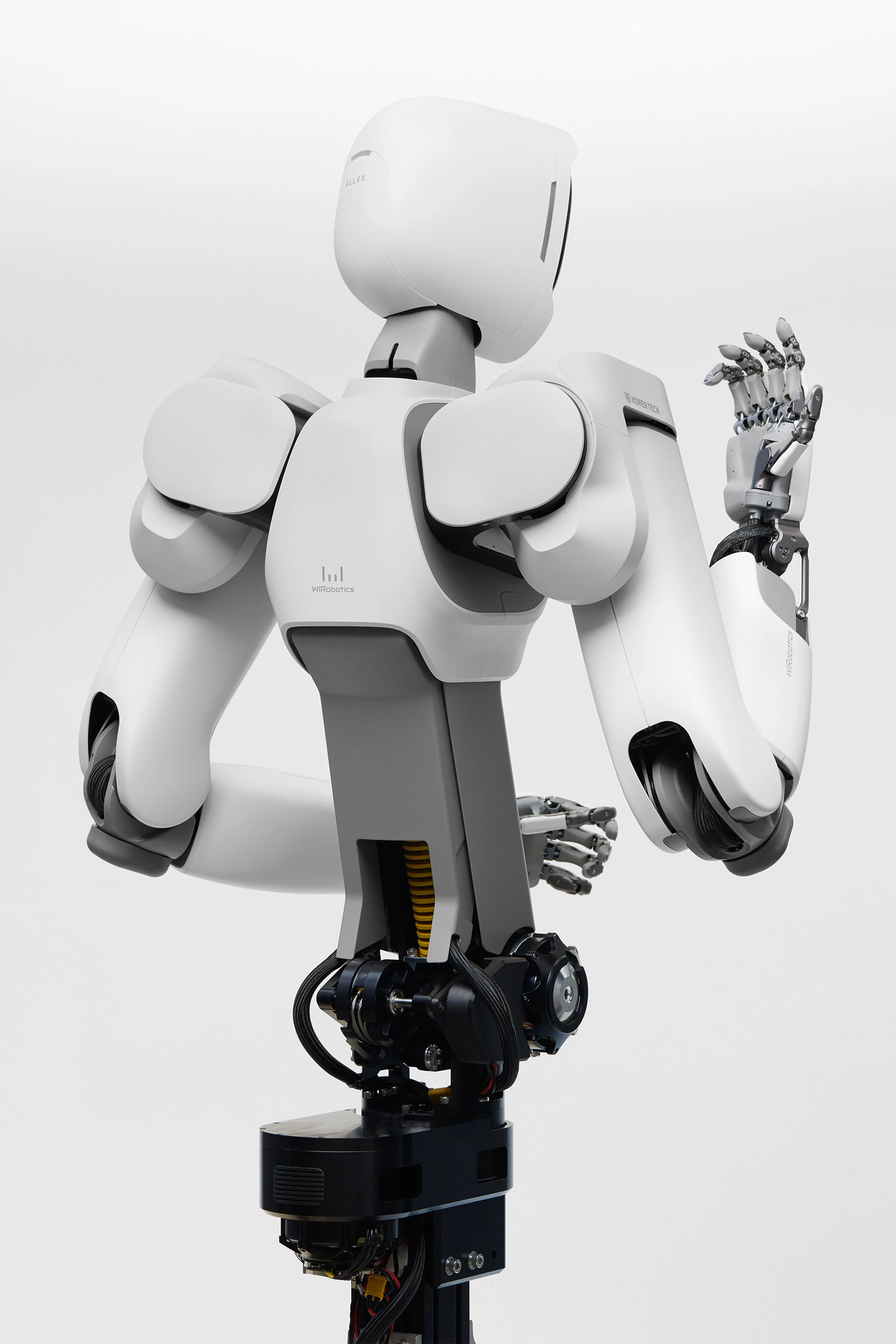
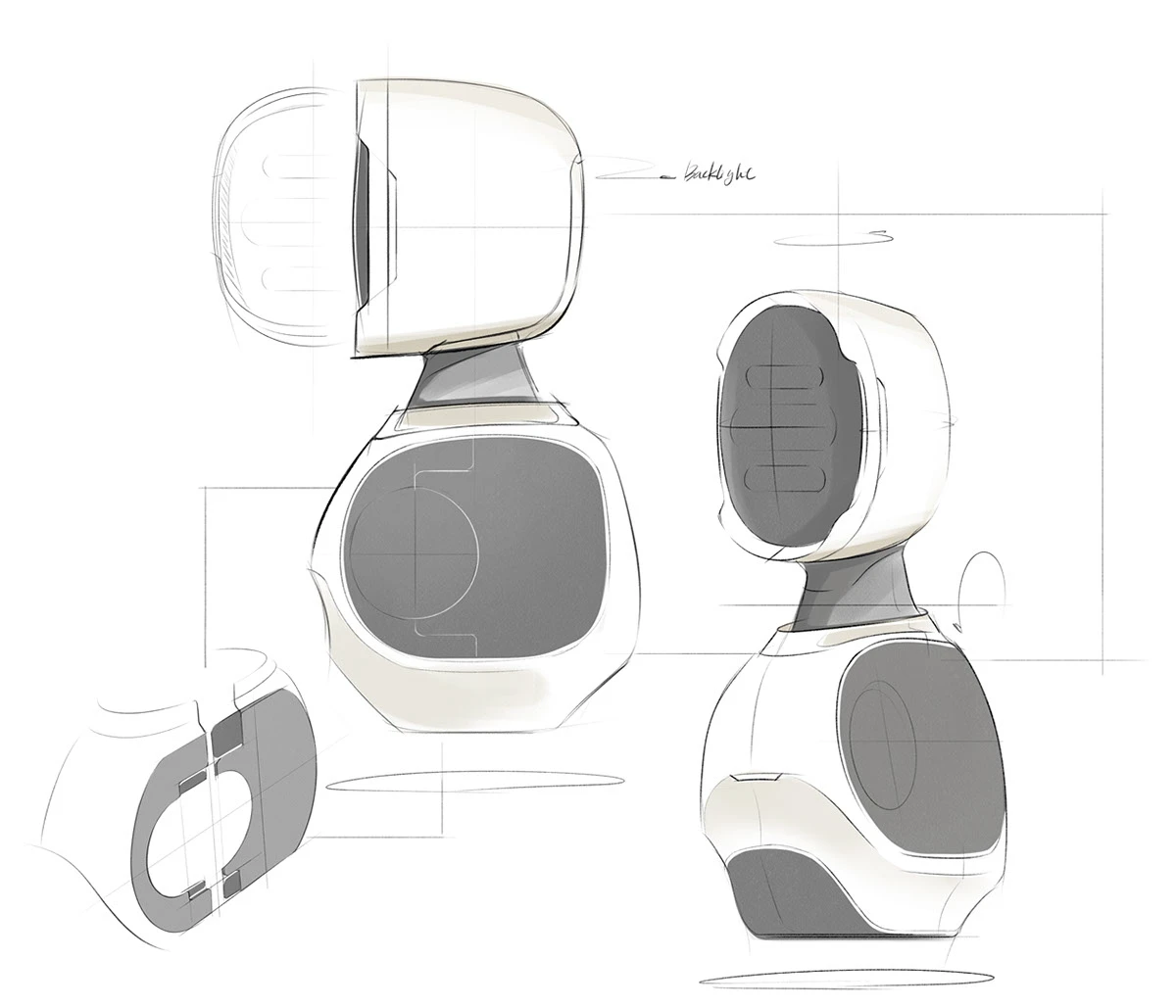
The head design plays a central role in shaping first impressions. ALLEX’s head avoids intimidation and does not suggest any specific face or expression. Its upper and lower sections frame a rounded facial form, minimizing unintended emotional cues while maintaining a neutral and approachable appearance.
The body is designed with balanced front and back volume to remain natural even when the shoulders rotate. A defined edge line on the front provides orientation and adjusts the visual weight. The waist narrows smoothly into the body, maintaining a natural presence from every angle.


Arms and Hands
The arms and hands of ALLEX were given a high degree of freedom to achieve natural and fluid movement. Their design highlights strength, flexibility, and precision while using simplified forms to maintain visual clarity. The shoulders and upper arms employ geometric volume that feels solid but not bulky, ensuring movements appear smooth and dynamic. The forearms feature refined curves and flowing lines, merging geometric shapes with organic contours for a polished appearance.

Interaction and Communication
LED lights on the head and body support user interaction. Positioned for visibility from all directions, they guide communication between people and the robot through clear visual cues.

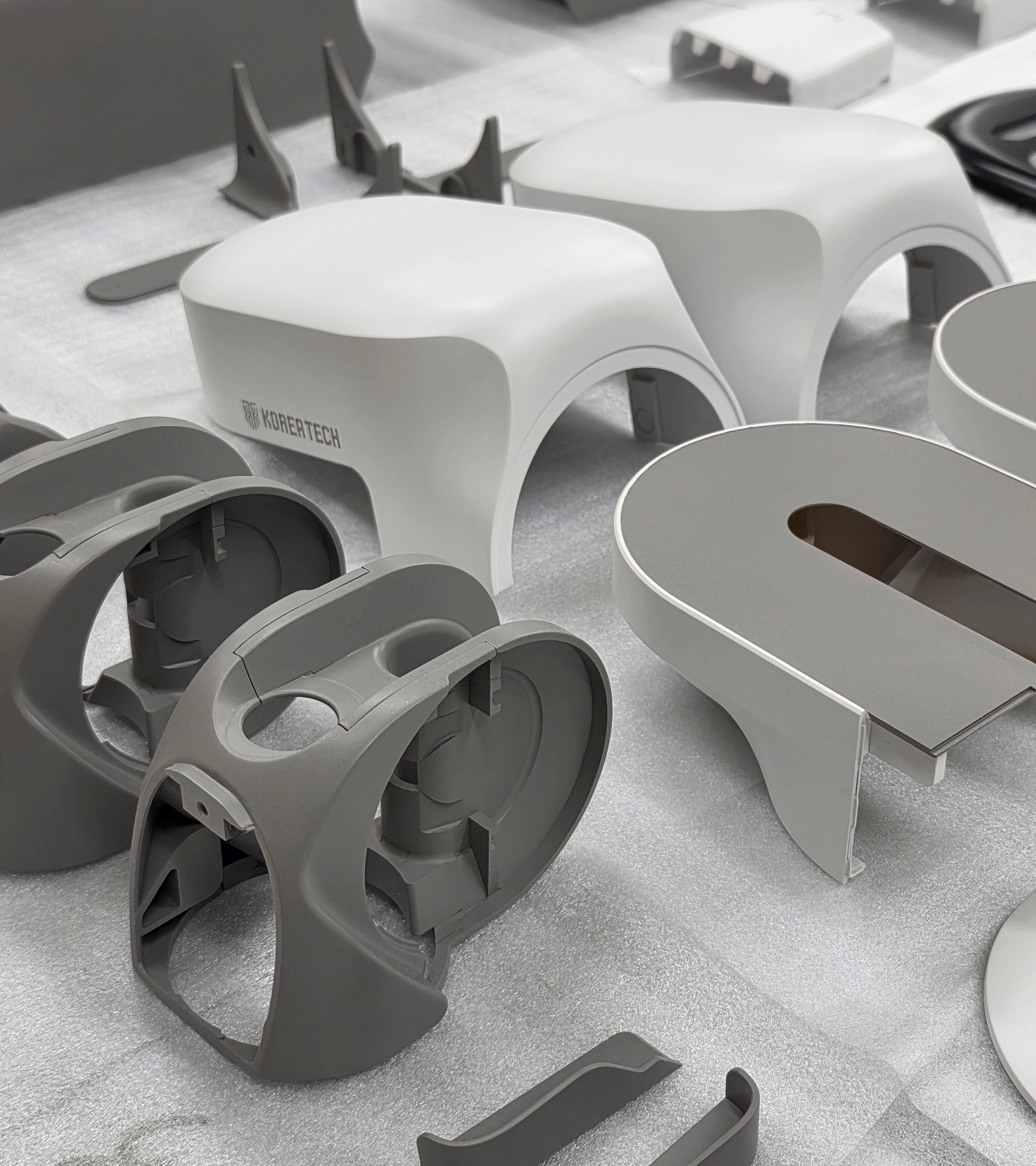
Colors and Materials
ALLEX’s color scheme combines Natural White with Sandstone Gray to create a bright and warm impression. Subtle surface textures were added to make physical contact feel natural and comfortable. The housing is designed with magnetic assembly for efficient attachment, detachment, and maintenance. Identical left and right parts streamline production and servicing, while carefully adjusted wall thickness prevents interference with the internal structure.

A Warm and Balanced Presence
The design of ALLEX embodies balanced proportions, refined form, and warm materials. It represents a union of machine and human qualities, presenting itself as both approachable and harmonious. With this approach, ALLEX shows how humanoid robots can become trusted companions that feel natural in our daily environments.
Project Credits
Head of Robotics Technology Kim Yongjae
Design Kim Kangdoo (Prof.) Baek Seungseon Kim Jimin Kim Chaemin
Mechanism Shin Yuseop Kil Seo Yeong Hong Janghwan Choi Jungjae Yun Seong Ho
Control & AI Lee Kwang Kyu Ye Wontae Nam Dongyun Kim Jung Gil
Electronics Cho Se Hyoung Cho Geunwoo Park Beomro Kim Doyun
Collaborators KOREATECH WIRobotics



Comments